The VIT research project was developed to provide the required complements to the Metrocargo technology. The VIT project fulfilled its goals and gave the SME participants the needed know-how and prototypes on four topics described below.
A vision system for container automatic load/unloadThis provides rapid and very accurate information on the precise positioning of corner fittings of the container to be handled, so that the lifting units that area part of the Metrocargo plant can insert a pin in the side slot and lift the container.
The figure shows the phases of automatic container unload, including corner fitting localization.
For more information:
Watch the video
Download the presentation of final results An innovative prototype of a low-cost 2D visual module to scan the train compositionThe train load plan, with the property codes of each container, is supplied prior to train arrival, but, as all things human, might contain mistakes. Metrocargo operations being fully automatic, it is necessary that such mistakes be detected before starting the unloading.
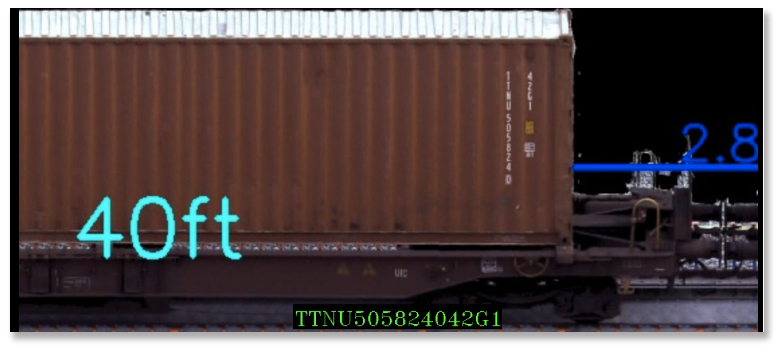
The visual system developed in VIT computes the sequence of containers loaded on the train and reads their code numbers as the train is entering or leaving the station, sending feedbacks in case of discrepancy with the load plan or when the writings are so damaged that the system cannot read them.
The incoming video is first processed to build automatically a panoramic view of the train. Then containers and gaps are located. The figure below shows an example on a very short train that should give an overall impression of the approach.
An ad hoc method for automatic code reading (or verification) allows us to reach a false negative rate of about 4% and a negligible false positives rate of about 0.01% (quantitative experiments carried out on the Vado Ligure plant at months 16-18 of the project). The figure shows an example frame of a correct code verification.
For more information:
Watch the video
Download the presentation of final results
Download the final report concerning this activity A video-surveillance system to monitor automatic operation areas where personnel should not enterMetrocargo is fully automated and no person must enter the work area; in addition to the usual precautions to avoid such event, we developed visual system that detects accurately the presence of humans (disregarding other moving objects) and gives a signal that can automatically stop all machinery in the concerned area, thus assuring boith safety and security of the plant.
The quantitative experiments carried out showed how the system works reliably in very difficult acquisition conditions. We estimate a false positive rate of 0.7% and a false negatives rate of about 3.5%.
The figure gives an example of people accurately detected at sunset (Vado Ligure plant)
For more information:
Watch video 1
Watch video 2
Watch video 3
Watch video 4
Download the presentation of final results
Download the final report concerning this activity A software predicting the effect on overall system performance depending on errors and failures of the vision devices and SWThe possibility of errors and failures by each vision system were evaluated and used to predict the overall performance of the system.
To this purpose we implemented simulation tools allowing us to evaluate and analyse the risk connected with the information coming from vision systems in order to manage the plant in safe conditions and guarantee a correct operability of the intermodal terminal. For more information:
Watch a screencast of the simulation software at work
Download the presentation of final results
|